

摘 要:针对市场上教育机器人引导和反馈形式不符合儿童认知,且不满足儿童的个性化需求等问题,文章通过设置实验模拟家庭场景,采集了儿童与教育机器人交互行为的多角度视频,并对儿童父母进行了半结构化访谈;通过对儿童与教育机器人交互行为的任务分析,得到儿童教育机器人在行为引导层面的痛点,进一步挖掘出痛点产生的原因,并以此为机会点从显性和隐形两个方面总结了儿童教育机器人在行为引导层面的设计原则,为实现儿童教育机器人更加高效、顺畅的整体性用户体验提供了指导性意见。
关键词:儿童;教育机器人;行为引导设计;任务分析
引言
现阶段儿童教育机器人存在情景识别率低、反馈不符合儿童认知和个性化服务缺失的问题。究其根源,主要是儿童教育机器人在引导和反馈方面没有提供顺畅、高效的用户交互路径。基于此,本文开展了对作为儿童娱乐教育同伴、应用于c端家庭陪伴场景、具有教育服务智能的服务机器人对儿童交互任务的行为引导研究。
一、研究现状和理论基础
不同于普通人群,儿童发展和hri特征对教育机器人的交互信息密度、交互方式、智能化与情感化提出了更高的要求。透明化的用户体验主要体现在引导和反馈两个方面。让用户将认知能力充分投入到任务中是提升用户体验的关键,引导用户完成目标是一条十分重要的原则,即用户每次决策和行为应均能够被提供明确的引导。
行为引导设计由设计引导力和环境影响力协调形成,其核心理念是通过设计来引导人们态度和行为的改变,这里的行为指的是以行为为核心的“行为—设计—环境”关系的和谐构建。行为引导设计深受行为劝导技术的影响而又区别于行为劝导技术,其应用范围相对于主要建立在计算机反馈机制上的行为劝导技术更大,引导是动机驱动型的,兼具内、外因意图的态度和行为改变。目前对于行为引导设计的理论原则探讨并不常见,应用于儿童教育机器人上的研究更是少之又少。
作为儿童娱乐教育同伴的教育陪伴机器人在教育机器人市场占据重要份额,并在市场利弊的共同影响下持续发展。儿童娱乐教育同伴按形态一般分为类人型和蛋型,通过整合物体识别、语音识别、运动控制、人脸识别、情感计算、机器学习、情景感知等技术实现绘本伴读、人机对话、讲故事、百科问答、物体识别、智能拍照和图形化编程等常用功能。现阶段的儿童娱乐教育同伴产品在交互的主动性上一般分布在智能产品主动交互模型的非主动执行(l1)、激活后等待用户响应(l2)和执行前请求同意(l3)三个阶段。家庭的陪伴娱乐属于低紧急任务场景,低紧急任务中的用户倾向于l3和l1的交互模式。通过桌面调研和部分教育机器人产品实际使用发现,儿童教育机器人存在另一种l3的模式,两者区别如图1所示。该模式下当预测到用户需求向用户请求时,智能设备将原第三级的“唤醒用户”与“推荐信息”结合在一起向用户发起询问并起到唤醒用户的作用,智能产品再根据“用户反馈”决策执行指令。
从研究儿童与智能服务机器人交互的文献来看,被研究的儿童年龄主要集中在儿童发展心理学领域的学前期(3—6岁)和儿童中期(6—12岁)。处于此阶段的儿童,在生理发展方面大脑体积越来越大,神经连接持续发展,出现功能侧化,粗大和精细运动快速提高;在认知方面,记忆、注意广度、符号思维和语言能力飞速提高;在社会性和人格发展方面,逐渐形成自我意识,开始把同伴当作独立的个体,在信任和共同兴趣的基础上与他人沟通,建立关系。kim提出机器人和人的实体交互越丰富,建立陪伴关系的效果越好。类人型教育机器人可以通过语音、动作、表情和app与儿童进行多样性的实体交互以发挥娱乐教育陪伴功能。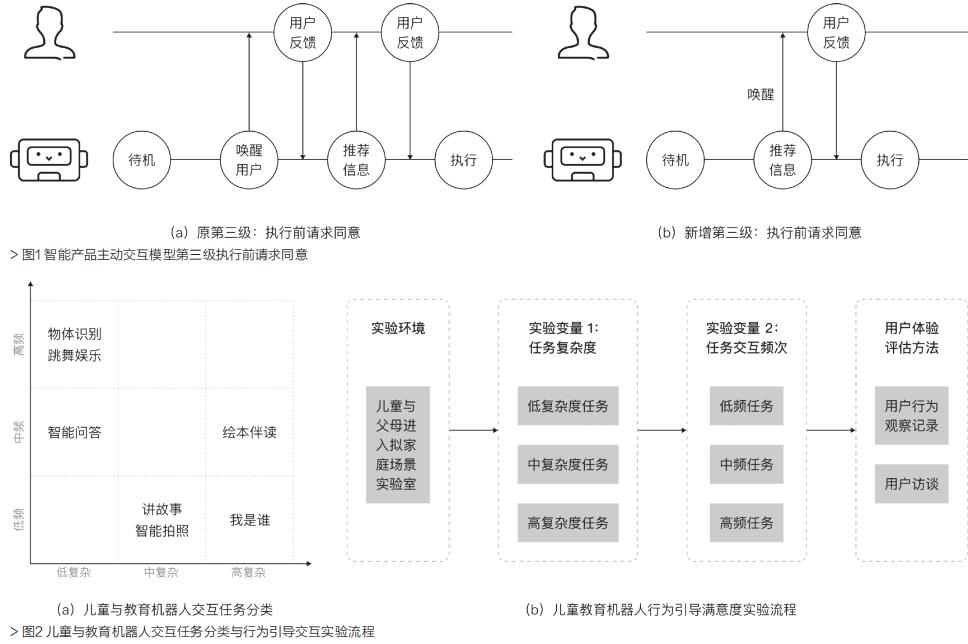
目前,主要的机器人研究热点可划分为本体研究、设计研究、实践研究和角色研究四个分支。儿童教育机器人的行为引导设计属于设计研究,但设计研究更多聚焦于教育机器人的类型和设计理念,集中在自然交互技术的推进,对教育机器人在行为引导设计方面的研究不足。为此,本研究从行为引导层面基于实验研究提出了相应的利来网的解决方案。
二、儿童教育机器人行为引导交互实验
本文选取优必选旗下类人型悟空教育机器人为行为客体,通过适用于各年龄段儿童、使用频次较高的行为测量方法定性地发现儿童交互动机和体验问题,定量地量化行为表现进而发现交互规律。
(一)被试选择
本实验行为主体为18名5—6岁的儿童,男孩9名,女孩9名。所有被试通过在学前班发放招募传单招募。
(二)仪器设备
实验地点为模拟家庭环境的实验室,实验室用蓝、粉、白儿童拼接爬行垫装饰。小书桌放置于爬行垫区域中心,周边放置儿童玩偶抱枕,营造温馨放松氛围。儿童坐于小书桌附近与悟空交互,悟空多活动于小桌板。实验使用3台摄像机多角度记录儿童与悟空的交互行为,分别主要获取儿童行为、悟空教育机器人行为、儿童与悟空教育机器人的任务交互流程。
(三)实验流程
实验记录拟家庭娱乐教育陪伴场景下儿童与悟空教育机器人的交互行为,通过对实验行为数据的任务分析、儿童受试者的满意度访谈、儿童受试者父母一对一的关于教育机器人功能需求和态度的半结构式访谈挖掘出儿童行为特点和交互痛点。本文选取悟空教育机器人与其他品牌娱乐同伴机器人常见的功能为实验任务,分别为我是谁、绘本伴读、物体识别、陪伴娱乐(智能问答、讲故事、跳舞娱乐)和智能拍照。
(四)变量选取设置
悟空教育机器人的行为引导主要通过语音、肢体表情动作进行提示和反馈来完成。结合智能产品主动交互模型,实验任务中的行为引导可分为l3任务外主动引导和l1任务内固定引导。为了对系统进行有效的可用性测试和评估,需要深入理解用户任务行为的执行与评估。本文借用方法分析描述模型(mad)中任务的概念,将任务描述为为了达到目标而执行的行为序列集合,将l1任务中儿童向悟空的指令输入和悟空处理指令后的输出,l3任务中悟空向儿童的推荐信息输出、儿童根据推荐信息的指令输入和悟空处理指令后的输出这两种行为序列定义为一个子任务,子任务通过时序关系联结成任务,子任务的输出可能会成为与之连接的下一个子任务的前置条件。按任务含有子任务的多少分为低复杂度任务、中复杂度任务和高复杂度任务,分别含有1个、2—3个和4个及以上的子任务。
实验过程中安排儿童父母观察交互过程,并在实验后对其进行一对一的半结构化访谈,访谈内容为对智能教育机器人的功能需求和态度。由于实验模拟家庭的娱乐教育陪伴场景,实验人员会引导受试儿童完成上述5项任务至少一次,剩余时间按儿童兴趣进行交互,因此儿童与不同任务的交互行为频度也是本实验的变量。为了使儿童较好地适应与悟空机器人交互的环境和便于获取儿童注意力较集中时段的行为信息,故将每次实验的时间控制在30分钟左右。考虑到单次实验时间,定义交互频次少于2次的任务为低频任务,2—3次的任务为中频任务,多于3次的任务为高频任务。图2(a)展示了儿童与教育机器人的交互任务按复杂度和交互频次分类情况,儿童教育机器人行为引导交互实验流程如图2(b)所示。
(五)实验结果
本研究将儿童与悟空教育机器人的交互行为进行切片,处理为子任务,关注儿童行为目标、悟空的引导行为、儿童对悟空指令遵从性和悟空的反馈行为。儿童对悟空指令遵从性体现了悟空行为引导的可理解性和有效性,可理解性是有效性的必要不充分条件。儿童对悟空反馈行为的评估结果关系到儿童与悟空交互任务的成功率和交互流程的满意度。悟空行为引导的有效是交互任务成功的前提。
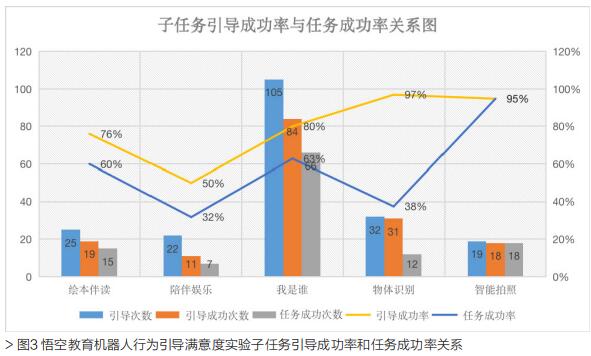
本研究结合引导成功率和任务成功率描述实验结果,其中引导成功率=子引导成功的次数/引导总次数×100%,引导任务成功率=子任务成功的次数/子任务总次数×100%。引导成功意味着儿童能够理解并遵从悟空指令进行相应的外显行为,任务成功指悟空能够根据儿童指令准确地完成任务。如图3可知,1.陪伴娱乐和物体识别的任务成功率低于50%。陪伴娱乐任务成功率低与引导成功率低有密切关联。悟空通过语音动作传递推荐信息的行为引导在陪伴娱乐类任务中多为l3任务外主动引导。儿童对悟空指令遵从性较低,儿童缺少fogg行为模型中目标行为发生的动机要素。物体识别的引导成功率高于95%,但任务成功率却低于40%,说明物体识别的行为引导是有效的,影响任务成功的因素多为悟空识别物体的准确率较低。物体识别成功后悟空自动调用知乎或搜索引擎科普内容,将文本转化为语音输出,与儿童的认知不匹配。2.智能拍照的引导成功率和任务成功率均在90%以上,说明本任务的信息密度安排较为合适。3.绘本伴读任务成功率也相对较低。绘本伴读多是悟空不能灵活地识别儿童翻页动作导致任务中断而造成的任务失败。4.作为低频高复杂任务“我是谁”的引导有效性处于中等水平,儿童对悟空引导语义的理解度低和悟空自身识别儿童动作的准确率低是影响任务成功的主要因素。
随着任务复杂度的增加,任务更不容易顺利正确地完成。高频任务多是低复杂度,信息密度的安排也相对更为合理。儿童对非主动执行的任务内固定引导的指令遵从性相比于执行前请求同意的任务外主动引导较高。儿童父母的半结构化访谈反馈了交互流程熟悉程度可能会影响儿童交互满意度和用户留存度的问题。
三、儿童教育机器人行为引导设计原则
针对上述影响任务成功的因素,本研究从显性和隐性层面提出了儿童教育机器人行为引导设计原则。
(一)显性层面
反馈要及时准确。儿童教育机器人信息反馈的准确性对于交互功能的达成十分重要。通过语音、动作、图形等信息反馈方式提示、暗示或限制儿童交互行为,反馈交互结果并引导其后续行为。符合儿童认知的反馈信息要有效结合准确性高的定量信息和易接纳的定性信息加以分析与设计。信息反馈的速度要与儿童的感觉接纳速度同步。反馈的方式倾向于多模态的及时反馈。反馈要有较高的目标关联度和符合上下文关系。
行为引导信息密度要合理。信息密度不仅指显示的信息量大小,还指交互信息间的逻辑关系和流程关系。逻辑关系是指命令和功能的对应关系,要合理安排交互命令与功能的一对一或多对一关系。交互流程是由若干个子任务通过形成的时序规律链接起来的,具有一定的自由度。在儿童集中于进行状态任务的情况下,减少其他重要突发l3任务执行前需请求同意的引导。合理安排交互信息逻辑和流程,能够减少任务中断和任务多线程带给儿童交互的不明确体验。
(二)隐性层面
行为引导要易于感知和理解。儿童教育机器人的行为引导设计应该考虑不同情境下儿童感觉能力阈限,以阈限的低值为标准考虑在不同情境下儿童感知能力的发挥。就理解而言,应该从减少学习的时间和强度、降低理解的难度和减少歧义的角度,基于儿童的本能和知识构建行为引导的理解体系。以实验中物体识别任务为例,按儿童认知物体与否可将意图划分为检验识别能力和存储物体认知,第二种情况下儿童教育机器人正确识别后物体详细信息的反馈语义要符合儿童当前阶段认知能力,易于儿童理解。
要利用用户认知动态设置行为引导模式。认知由儿童对产品多感官信息结合记忆或经验进行存储和加工而形成,通过行为语义作用于产品的功能实现,随儿童的成长而有所变化。利用行为间接作用于设计这一点,把握儿童对产品的熟悉程度、不同功能任务交互的频次与时间等因素,合理设计不同阶段的行为引导信息密度,动态设置教育机器人的行为引导模式。例如,随着儿童对交互任务流程熟悉度的加深,可以适当调整子任务的时序关系,将行为引导提示根据儿童交互行为的实施情况适当删减。
四、结论
儿童教育机器人的行为引导从本能层次帮助给予儿童好奇、兴奋以及满足感的体验,从行为层次引导儿童完成最终交互任务,达到获取科学知识、增强动手时间能力,从反思层次提升儿童综合素养,帮助儿童发展认知,协助构建人生观。本研究丰富拓展了智能产品主动交互模型,采用实验和用户访谈相结合的方式探究了教育机器人在行为引导层面的交互痛点和原因,并提出了儿童教育机器人在行为引导层面的设计原则,为相关设计提供了应用参考。
项目来源:企、事业单位委托项目 项目编号:202102055018
参考文献:
[1]苟锐.人机交互设计美学[m].成都:西南交通大学出版社,2021:60-75.
[2]赵颖,谭浩,朱敏,袁翔,李士岩.智能音箱主动交互行为的用户满意度研究[j].包装工程,2021,42(14):224-229.
[3]潘亚林,李思琪,童慧,何思南,周茉莉,关岱松.儿童与智能服务机器人交互体验评价方法综述[j].人类工效学,2019,25(04):74-79.
[4]罗伯特s.费尔德曼.儿童发展心理学:费尔德曼带你开启孩子的成长之旅[m]北京:机械工业出版社,2015.
[5]kim aram,a home social robot for social relationships:r&d of a home social robot auditorily sharing in home activity information of single-person households[d].seoul:yeonsei university,2017.
[6]李新,李京津,高博俊,李艳燕.教育机器人的研究现状与发展建议——基于2014~2018年web of science核心数据库相关文献分析[j].现代教育技术,2020,30(01):5-11.
[7]李娟妮,华庆一,张敏军.人机交互中任务分析及任务建模方法综述[j].计算机应用研究,2014,31(10):2888-2895.
利来app官方下载的版权声明:【除原创作品外,本平台所使用的文章、图片、视频及音乐属于原权利人所有,因客观原因,或会存在不当使用的情况,如,部分文章或文章部分引用内容未能及时与原作者取得联系,或作者名称及原始出处标注错误等情况,非恶意侵犯原权利人相关权益,敬请相关权利人谅解并与我们联系及时处理,共同维护良好的网络创作环境,联系邮箱:[email protected]】




